空天海地一体化观测网络的任务管理探讨与展望
摘 要:观测网络的网络拓扑动态性、资源异构性及其系统复杂性给空天海地一体化观测网络的任务管理带来了巨大的挑战。本文首先研究探讨面向一体化观测网络及其任务管理的主要内容、关键技术及其面临的挑战。为了应对观测网络面临的问题,本文将基于ACP的平行智能方法引入到观测网络任务管理领域,提出平行观测网络的概念与架构。平行观测网络首先通过人工观测网络系统来模拟实际观测网络系统;然后,进行大量不同观测场景及事件的计算实验进行训练与评估;最后,通过平行执行来滚动在线优化人工和实际观测网络系统,从而实现对复杂观测网络的描述智能、预测智能和引导智能。因此,可以实现根据观测环境及任务需求快速灵活地组网,提高网络的灵活性及任务管理效率。平行观测网络将为国家网络数据安全、能源与资源开发、环境监测、灾害预报预警等研究提供有效支撑。
关键词:空天海地一体化观测网络任务管理
0 引言
随着全球范围内对网络服务需求的增长,建设覆盖范围广的空天海地一体化观测网络[1-2],充分利用空间、海洋与地面网络在移动网络接入和覆盖范围等方面的互补性,不仅成为互联网的发展趋势,也是我国科技创新的重要项目。作为近些年出现的国内外前沿研究的重点之一,空天海地一体化观测网络采用探测传感技术、观测技术、通信技术、地理信息系统等关键技术,研究空天海地环境中环境参数与观测目标信息的获取、存储、传输、处理、分析、管理、显示和应用,从而满足环境变化监测、自然灾害预报预警、国土资源智能规划管理、城市建设发展、智慧农业、智能交通、国家安全等重大需求,保障社会和经济的可持续发展。
空天海地一体化观测网络是空间网络、海洋网络和地面网络的融合网络,如图1所示。一体化观测网络由不同功能的传感器节点组成,为了完成观测区域内的数据采集、处理和传输任务,这些节点以自组织的方式构成观测网络。随着网络应用的增加,网络的管理越来越重要。网络中单节点的计算能力低,无法独自完成复杂的应用。因此,网络任务一般会分解成多个任务,然后将这些任务调度并分配到多个传感器节点上处理完成,并且,这些任务之间具有一定的优先级关系。一体化观测网络中,网络管理任务完成的时间成本及可靠程度是衡量观测网络管理性能的重要指标,因此,其网络任务管理及资源调度技术的研究需要考虑完成任务过程中的多个因素,比如,时间、能量消耗、可靠性等性能指标[3]。


目前针对一体化观测网络的任务管理研究大多集中在网络的任务调度及资源管理方面[4-10]。YU等[4]介绍了一种分布式任务分配算法,综合考虑了通信、计算、感知及睡眠活动的能量成本,针对传感器节点上的工作负载进行最优平衡分配。KIRAN、ABDELSALAM、WANG等[5-7]提出了动态资源管理和规划调度的方案和设计,目标在于针对具体环境实现优化的任务管理和资源调度效果。同时,针对当前云端一体化网络的特点,针对不同场景的任务管理优化方法也是研究热点之一[8-10]。但是,现有研究都有各自的缺点,未考虑到当前一体化观测网络的工程复杂性和社会复杂性双重问题。
综上所述,随着万物互联及人工智能技术的发展,越来越多的观测网络设备以不同的方式接入到了现有网络中来,越来越多的观测业务和服务种类依托在现有网络上,越来越大的数据量和数据处理承载在现有网络上,整个观测网络呈现出异构、泛在和复杂的特点。实际的观测网络系统的工程复杂性和社会复杂性越来越高。而且,观测网络系统也具有动态性和不可预测性的特点,是一个典型的复杂系统。观测网络的现状导致了资源利用率不高、功能扩展造价高、管理复杂等种种问题。
为了有效应对上述问题,本文将平行智能理论[11]引入到一体化观测网络,提出平行观测网络的架构,通过人工观测网络对网络系统及任务管理功能进行软件化定义,并与实际观测网络的进行实时信息传递及相互优化,通过大量的计算实验来获取网络任务管理方案,实现对实际网络任务管理的实时决策指导及评估优化,从而满足不同观测场景需求和网络任务服务目标,实现对一体化观测网络及其任务管理的描述智能、预测智能和引导智能。
1网络任务管理
空天海地一体化观测网络是以空间网络、天基网络、海洋网络和地面网络为基础,支持空、天、海、地各类用户接入且按需服务的信息观测网络,是实现全球互联互通的重大网络信息基础设施,目前已经受到了越来越多的关注。另外,随着软件定义网络(SDN)[12]及网络功能虚拟化(NFV)[13]等技术的发展和成熟,为智能化且高效可靠的网络管理技术提供了开放环境。SDN促进了网络管理的发展,允许对异构网络元素进行复杂的管理,并可实现网络任务功能的重叠[14]。此外,通过NFV的动态扩展过程,不断适应变化的网络拓扑结构、传输负载和网络任务功能。一体化观测网络的目标是将整个空间的网络资源整合到一起,全面共享、统一管理并调度各种网络任务及网络资源。为了实现网络资源的共享,首先要明确可用资源有哪些[13-14],用户提交的任务需要由系统来分配资源并控制其运行,包括要将其分配到哪些设备上运行、调用哪些数据、何时开始运行等。
因此,一体化观测网络必须具备两种密不可分的基本功能[15-16]:资源管理和任务管理。资源管理的目的是使用户了解目前网络系统中各类资源的使用情况及储备情况,为任务管理提供参考依据,并通过预留资源等设置,实现有效地使用一体化网络资源。如图2所示,网
络任务管理主要包括3个部分:监控、分析和执行。监控阶段是从所处环境中获取原始数据信息;而分析阶段是基于对收集到的数据信息的解释和推理;最后,在执行阶段,执行相关的资源和任务管理操作。


1.1网络特点
空天海地一体化观测网络中的传感器节点可以感知所处环境的相关信息,并对观测到的信息进行数据处理,之后将其传送到远程中心或需求用户。观测网络具有以下几项主要特点:(1)网络节点规模大、数量多;(2)传感器功耗低;(3)节点易故障;(4)动态变化的网络拓扑结构;(5)网络多跳、自组织。
1.2管理内容
网络任务管理主要包括任务的创建、提交、删除、挂起和唤醒,以及实现任务的调度和任务状态的跟踪等。网络任务管理过程中,可以先针对任务进行分解,分解后的子任务之间具有优先级关系,然后将这些子任务分配调度到不同的传感器网络节点上完成。为了降低网络的资源消耗,可以通过消除冗余和减少通信信息量来实现目标。另外,为了实现网络管理任务的并行处理,需要解决的关键问题是如何找到最佳的任务管理及调度方案,也就是如何将特定的任务分配给最合适的网络节点去处理,从而实现最优的网络状态并满足用户的需求。
通常,一体化观测网络的资源管理和任务调度问题都可以看作一定资源约束下的多目标最优化问题[17-18]。解决此类问题的方法一般是将其规约成线性或二次优化模型。首先,确定对目标值产生影响的决策变量;然后,用这些决策变量表达出目标函数;最后,确定限制决策变量取值的约束条件。
1.3管理分类
一体化观测网络任务管理一般情况下主要包括:网络感知任务管理、网络路由任务管理以及网络数据处理的管理。网络感知任务主要是指感知观测区域内的相关指标参数、图像、音频、视频等关键信息;网络路由任务管理则用于网络节点针对所需传输信息的中继、转发、及协作传输等;网络数据处理任务是通过整理所有接收到的来自不同传感器节点的信息数据并对其进行相应的处理。网络任务分为独立性任务及合作性任务。其中,独立性任务是指当完成网络中任务不依赖其他任务时,也就是这些任务之间没有相关的优先级关系;而合作性任务是指完成某一网络任务时会受到其他任务的完成情况的影响,即任务之间具有相关性。同无线传感网络一样,空天海地一体化观测网络的任务管理问题可采用智能优化算法在任务分配与资源调度可能的方案空间内寻找最优解,并且在可接受的时间复杂度内找到较优的方案。
1.3.1集中式任务管理
在集中式管理的观测网络中,中心控制管理器负责统一管理网络中所有的网络节点,包括传感器节点、网关节点及终端节点等。中心控制管理器可以实时获取所有该网络中正在运行中的网络节点的状态信息,并将这些信息集中存储,然后根据网络中不同节点的任务管理需求,综合考虑整个网络状态后作出相关的任务管理方案决策。集中式管理的观测网络具有模型易实现的优点,但其需要强大的综合处理及计算能力,很难实现实时的全局信息处理及任务管理方案的下发,系统实现的复杂度高、处理时间长,已成为集中式管理任务的难题之一。例如,当该网络中某一分支节点发生故障时,将会对整个系统管理的性能产生影响,因为需要从整个网络资源系统中终止故障节点的任务管理程序。而且,网络中所有节点的信息都需要实时地直接反馈到中心管理控制器,给网络通信负载带来了很大的压力。但是,集中式管理的优势在于,中心管理控制器通过整合分析整个网络的运行情况,产生非常有效且理论上最优的任务管理及调度方案。
总的来说,集中式任务管理方案通常适用于小型的观测网络,通过考虑全局网络任务及资源来综合分析并分配任务和网络资源,从而实现全局最优的状态。由中心管理节点将网络中的任务进行统一规划管理,之后分配到该网络中各个节点上完成网络管理任务。该方案不要求任务之间具有很高的相关性,一般情况下对于静态的任务管理环境更加适合。集中式任务管理与调度的基本算法都在中心管理控制器上实施运行,主要包括基于进化算法、基于拍卖机制以及基于搜索算法的任务管理方法等,从而实现全局统一管理该网络中节点之间的任务分配及资源调度。
1.3.2分布式任务管理
分布式任务管理是指对于网络系统中任务管理和资源调度进行分布式的处理,无须中心控制器进行统一协调,分布式处理过程中任务之间彼此交互。该方法不是通过点对点的方式直接收集系统中所有节点的状态信息,从而通过有效避免集中式任务管理调度中所需要的信息处理及传输时延上的问题,提升观测网络的可扩展性。而且,一旦网络中某个传感器节点发生故障停止工作,也不会对整个网络系统的性能造成严重的影响。与集中式任务管理模式相比,分布式任务管理使得观测网络容错性更强、系统可靠性更高。但是,分布式任务管理调度因为不能实时了解到全网任务管理及资源调度情况,无法进行全局任务管理。所以,其管理调度方案无法实现全局最优,通常可以得到次优方案。
在分布式任务管理中,负责完成任务的网络节点之间需要进行沟通协调,这对于网络系统的可靠性是非常重要的。一般情况下,可以通过社会和经济启发方法,来对网络节点间的任务安排进行协调处理。基于不同的协调处理方案,分布式管理可以分为基于市场机制的管理、基于社会机制的管理及基于代理的管理等方法。其中,博弈论、拍卖和契约等机制属于基于市场机制的管理方法;战略传播、联盟形成和集体机制等属于基于社会机制的管理方法;而基于代理的管理方法是指利用代理的自主建模和分布式计算能力进行网络任务的管理和资源的分配。
1.3.3混合式任务管理
通过上述可知,集中式任务管理对于小型的观测网络系统更加适用,而大型的观测网络系统则更适合采用分布式的任务管理方法。那么,对一些中型的观测网络系统,尤其是网络拓扑结构因网络节点移动而不断发生变化的动态观测网络系统,以上两种方案都不能获得很好的任务管理性能。因此,考虑将集中式和分布式任务管理综合考虑,充分利用他们各自的优点来实现对网络任务的管理优化和资源的高效利用,也就是混合式任务管理。例如,将观测网络的任务分割为子任务,使用集中式管理将网络中部分节点安排为子任务的管理节点,而子任务的管理节点之间可以通过分布式管理方案进行协商谈判,进行任务管理与资源分配,而对于子任务及子网络内的管理方案由该管理节点自行选择管理方案。
2问题与挑战
2.1节省网络能源消耗
观测网络很多时候应用在环境危险、面积空旷的区域作业。网络部署组成后,很难在观测环境中为感知节点更换电池。节点的主要任务是进行信息的感知和传输。如何均衡整个网络的任务及能源消耗,优化网络结构,延长整个网络的生命周期,成为需要解决的关键问题之一。
2.2节点的不稳定性影响
现有的大部分研究关注于研究网络任务管理调度过程中消耗的能量及完成任务所需要的时间成本,但是没有同时综合考虑观测网络中的其他性能特点,比如任务完成的可靠性会受到节点的不稳定性影响,网络的生命周期会因节点的不均衡负载而缩短。在多任务的管理调度优化的研究中,大部分的研究首先对所有任务进行梳理,之后按照一定的顺序对这些目标任务进行优化管理,这类方法的复杂度高,大大增加了任务管理的运行时间,影响了算法的可实施性。因此,如何将任务完成的可靠性、能量消耗、时间成本以及能量均衡等系统性能指标同时综合考虑,并对其任务管理方案进行优化及对资源有效利用,是重要的挑战之一。
2.3动态任务调度与优化
网络任务调度优化方法研究中很多都是静态的任务调度,动态任务调度研究不多,并且当网络中的某个传感器节点因故障引起状态变化时,为了继续执行完成任务,一般会采用迁移任务或者进行任务冗余备份的方式,这类方法会影响任务执行的时间有效性,并引起网络资源的浪费。另外,观测网络因其随机变化的环境特点,在任务管理方案及算法运行过程中,环境也会发生变化。目前,研究没有考虑到环境变化会导致这些已在运行算法的任务管理调度方案无法满足变化后的网络环境状态,因此后续需要将任务进行迁移,增加了任务管理的成本代价。为了应对这类问题,基于智能优化的任务管理算法是当前网络任务管理调度的主要研究方向,例如遗传算法、粒子群算法等。然后这些方法仍然存在局限性,比如,如何模拟动态变化的网络环境,如何更有效地跟踪网络环境的变化情况,是这类方法的研究挑战和难点。
综上所述,空天海地一体化观测网络目前研究面临的主要问题是缺乏对网络任务管理系统化的整体研究。一体化观测网络是典型的复杂网络系统,具有工程复杂性和社会复杂性的特点,而其网络任务管理具有无法拆分还原、不确定性高、多样化等特征,迫切需要预先针对网络任务管理方案进行全面且准确的预测、评估和优化,实现对一体化观测网络任务管理的动态优化控制。目前,研究并没有提供一种较好的解决方案。因此,本文提出引入ACP平行智能方法对观测网络系统进行建模,以人工观测网络系统为“实验室”,进行计算实验,并平行执行引导实际观测网络系统,有效应对该复杂网络系统的上述问题。
3平行观测网络
本文基于平行智能理论和ACP方法[11],提出集空天海地一体化数据采集及传输系统、云计算支撑平台、大数据应用服务系统于一体的基于平行智能的平行观测网络,以有效应对目前一体化观测网络任务管理研究及建模面临的主要问题。
3.1平行智能方法
平行智能系统主要分为3部分,如图3所示,包括人工系统(Artificial Systems)、计算实验(Computational Ex-periments)、平行执行(Parallel Execution)。平行智能基础是ACP方法,其核心思想为:针对具有工程复杂性和社会复杂性的复杂系统,构造与其实际系统对应的人工系统,并使得人工系统与实际系统之间平行互动,形成平行系统。平行系统的目标是引导实际系统逼近人工系统,而不是人工系统逼近实际系统;借助人工系统使复杂问题简单化,从而实现复杂系统的描述智能、预测智能和引导智能。平行智能的主要特点是人工系统建模、数据驱动,基于实际系统数据和人工系统数据,利用大量的计算实验对复杂系统的行为进行分析和评估,通过虚实互动、滚动优化的平行执行来完成任务,从而减小高复杂性目标与现实差距的“建模鸿沟”。


平行智能研究主要面向“人在环路中”、具有高度社会和工程复杂性的社会物理信息系统,通过研究数据驱动的描述智能、实验驱动的预测智能,以及互动反馈的引导智能,为不定、多样和复杂的问题提供灵捷、聚焦和收敛的解决方案。目前,平行智能已在多个应用领域产生了显著的理论和实践成果,如平行交通、平行驾驶、平行控制、平行视觉、平行网络、平行社会、平行农业、国防安全等[19-27]。
3.2平行观测网络系统
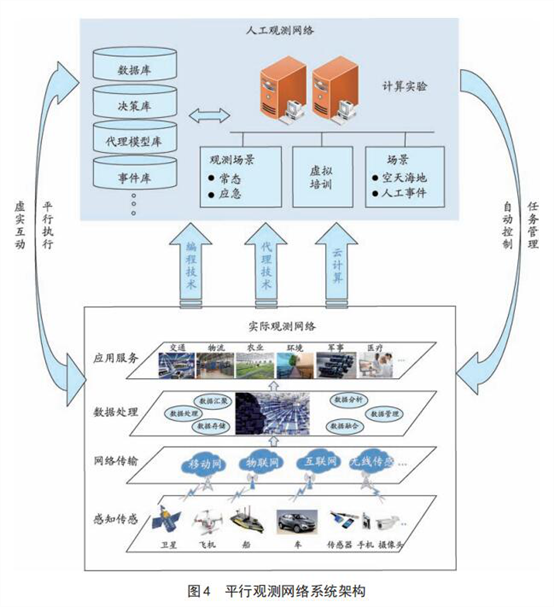
平行观测网络包括实际观测网络系统和人工观测网络系统两部分,如图4所示。以平行系统理论为指导,以人工观测网络、计算实验为技术基础,建立适应具体观测需求的网络模型和复杂网络动态计算实验平台。基于数据库、决策库、代理模型库、时间库等方法,通过设计大量的人工实验场景及人工事件进行计算实验和虚拟培训,从而有效地改善一体化观测网络的现状,提高实际观测网络系统的信息处理传递效率及提升用户体验状态。
平行观测网络将基于ACP方法的平行智能理论引入到一体化观测网络,在物理和网络信息空间数据的驱动下,结合无线传感、数据分析等技术,借助平行网络架构理论,针对空天海地一体化观测网络构建与实际观测网络平行的人工观测网络,然后利用人工观测网络、计算实验与平行执行来建立虚实交互、协同演化、闭环反馈的平行观测网络,实现智能化的网络任务管理。
3.2.1人工观测网络系统
人工系统建模是要建立与实际观测网络等价的人工观测网络系统,通过在人工观测网络上的大量的计算实验找到实际系统的等价结果,保证从人工观测网络系统上得到的认识等价于实际观测网络系统,对人工观测网络系统的结果等价于对实际观测网络系统的管理与控制。人工观测网络架构采用创建虚拟的网络代理的方法,这些代理逻辑上彼此隔离,但可共享底层物理网络,从而通过网络任务软件定义的管理平台实现根据网络任务及资源管理的灵活按需调配。

3.2.2计算实验
计算实验是通过在人工观测网络进行大量的各种实验,对网络任务管理及相关服务优化进行分析和预测,从而引导实际观测网络实现更优的运行状态。在人工观测网络系统上通过计算实验方法进行大量的实验,分析和预测复杂观测网络的行为。系统地设计大量不同的试验,引入各种不确定或者一般意义上难以量化的事件和因素,多次重复并以统计归纳的方法对结果进行分析,进而用来验证对复杂观测网络系统特征和行为进行分析得到的各种可能和假设。
通过人工观测网络系统上的计算实验,可以迅速地学习并掌握观测网络系统当前任务管理的各种状况以及对应的策略。另外,通过人工观测网络系统的计算实验模块,分析了解各种不同网络场景和观测需求情况下的系统状态和行为,并且评估系统在采用不同解决方案时的性能效果,这些解决方案可以作为观测网络任务管理与控制决策的依据。最后,人工观测网络系统对实际观测网络系统的行为进行预估,从而为寻找对实际观测网络系统有效的任务管理和服务并优化提供依据。
3.2.3平行执行
平行控制和平行测试是平行观测网络平行执行环节的重要技术。平行控制和平行测试使人工观测系统和实际观测系统能够平行交互、在线验证,能够针对不同的任务实例优化任务调度和资源管理。因此,相比于传统观测网络更加智能。平行控制基于实际系统的信号,收集状态-执行-奖惩信号,建立人工系统,产生人工数据;基于不同的人工系统训练多组优化控制策略,并基于最优性原理,训练评判网络对优化策略进行评判,择优对实际系统进行控制和优化。平行测试融合专家经验和计算机虚拟测试,它能够通过人类专家的指导实现认知机制的自动升级,同时通过对抗式学习模型自动生成新的测试任务,进一步提升其自动测试验证能力。
4 结论与展望
本文首先综合探讨了空天海地一体化观测网络任务管理需求与面临的技术挑战,重点介绍了观测网络任务管理的特点、主要内容和关键管理算法。为了应对现有观测网络面临的问题和挑战,本文结合平行智能理论,提出了平行观测网络,介绍了软件定义复杂异构的人工观测网络、计算实验方法以及平行执行过程。平行观测网络的思路可为空天海地一体化观测网络高效的任务管理提供技术指导。本文提出的平行观测网络为空天海地一体化观测网络任务管理的科学化、高效化和系统化提供了技术基础和指导。
参考文献:
[1]HEROLD M,WOODCOCK C E,LOVELAND T R,et al.Land-Cover Observations as Part of a Global Earth Observation System of Systems(GEOSS):Progress,Activities,and Prospects[J].IEEE Systems Journal,2008,2(3):414-423.
[2]WANG Y,SHENG M,ZHUANG W H,et al.Multi-Resource Coordinate Scheduling for Earth Observation in Space Information Networks[J].IEEE Journal on Selected Areas in Communications,2018,36(2):268-279.
[3]HE L J,LI J D,SHENG M,et al.Dynamic Scheduling of Hybrid Tasks with Time Windows in Data Relay Satellite Networks[J].IEEE Transactions on Vehicular Technology,2019,68(5):4989-5004.
[4]YU W L,HUANG Y Q,GARCIA-ORTIZ A.Distributed Optimal On-Line Task Allocation Algorithm for Wireless Sensor Networks[J].IEEE Sensors Journal,2018,18(1):446-458.
[5]KIRAN N,PAN C Y,WANG S H,et al.Joint Resource Allocation and Computation Offloading in Mobile Edge Computing for SDN Based Wireless Networks[J].Journal of Communications and Networks,2019:1-11.
[6]ABDELSALAM H S,OLARIU S.Toward Efficient Task Management in Wireless Sensor Networks[J].IEEE Transactions on Computers,2011,60(11):1638-1651.
[7]WANG J J,ZHU X M,QIU D S,et al.Dynamic Scheduling for Emergency Tasks on Distributed Imaging Satellites with Task Merging[J].IEEE Transactions on Parallel and Distributed Systems,2014,25(9):2275-2285.
[8]YU W L,HUANG Y Q,GARCIA-ORTIZ A.Optimal Task Allocation Algorithms for Energy Constrained Multihop Wireless Networks[J].IEEE Sensors Journal,2019,19(17):7744-7754.
[9]LEE H,LEE S H,QUEK T Q S.Deep Learning for Distributed Optimization:Applications to Wireless Resource Management[J].IEEE Journal on Selected Areas in Communications,2019,37(10):2251-2266.
[10]ZHANG Z,ZHAO D B,GAO J W,et al.FMRQ—A Multiagent Reinforcement Learning Algorithm for Fully CooperativeTasks[J].IEEE Transactions on Cybernetics,2017,47(6):1367-1379.
[11]WANG F Y.The Emergence of Intelligent Enterprises:From CPS to CPSS[J].IEEE Intelligent Systems,2010,25(4):85-88.
[12]KIM H,FEAMSTER N.Improving Network Management with Software Defined Networking[J].IEEE Communications Magazine,2013,51(2):114-119.
[13]ABU-LEBDEH M,NABOULSI D,GLITHO R,et al.On the Placement of VNF Managers in Large-Scale and Distributed NFV Systems[J].IEEE Transactions on Network and Service Management,2017,14(4):875-889.
[14]KREUTZ D,RAMOS Fernando M V,VERÍSSIMO P E,et al.Software-Defined Networking:A Comprehensive Survey[J].Proceedings of the IEEE,2015,103(1):14-76.
[15]ZHANG W F,WANG L Z,MA Y,et al.Design and Implementation of Task Scheduling Strategies for Massive Remote Sensing Data Processing across Multiple Data Centers[J].Software:Practice and Experience,2014,44(7):873-886.
[16]TUNCER D,CHARALAMBIDES M,CLAYMAN S,et al.Adaptive Resource Management and Control in Software Defined Networks[J].IEEE Transactions on Network and Service Management,2015,12(1):18-33.
[17]YU Y,PRASANNA V K.Energy-Balanced Task Allocation for Collaborative Processing in Wireless Sensor Networks[J].Mobile Networks and Applications,2005,10(1/2):115-131.
[18]XIE T,QIN X.An Energy-Delay Tunable Task Allocation Strategy for Collaborative Applications in Networked Embedded Systems[J].IEEE Transactions on Computers,2008,57(3):329-343.
[19]WANG F Y,ZHANG J J,WANG X.Parallel Intelligence:Toward Lifelong and Eternal Developmental AI and Learning in Cyber-physical-social Spaces[J].Frontiers of Computer Science,2018,12(3):401-405.
[20]WANG F,WANG X,LI L,et al.Steps Toward Parallel Intelligence[J].CAA Journal of Automatica Sinica,2016,3(4):345-348.
[21]LI X,WANG K F,TIAN Y L,et al.The ParallelEye Dataset:a Large Collection of Virtual Images for Traffic Vision Research[J].IEEE Transactions on Intelligent Transportation Systems,2019,20(6):2072-2084.
[22]LI L,WANG X,WANG K,et al.Parallel Testing of Vehicle Intelligence via Virtual-real Interaction[J].Science Robotics,2019,4(28):1-3.
[23]HAN S S,WANG X,ZHANG J J,et al.Parallel Vehicular Networks:a CPSS-Based Approach Via Multimodal Big Data in IoV[J].IEEE Internet of Things Journal,2019,6(1):1079-1089.
[24]LV Y,CHEN Y Y,LI,et al.Generative Adversarial Networks for Parallel Transportation Systems[J].IEEE Intelligent Transportation Systems Magazine,2018,10(3):4-10.
[25]WANG F Y,ZHENG N N,CAO D P,et al.Parallel Driving in CPSS:a Unified Approach for Transport Automation and Vehicle Intelligence[J].CAA Journal of Automatica Sinica,2017,4(4):577-587.
[26]WANG F Y.Parallel Control and Management for Intelligent Transportation Systems:Concepts,Architectures,and Applications[J].IEEE Transactions on Intelligent Transportation Systems,2010,11(3):630-638.
[27]LI,LIN Y L,ZHENG N N,et al.Parallel Learning:a Perspective and a Framework[J].CAA Journal of Automatica Sinica,2017,4(3):389-395.